でかい靴を履かせてみる
標準品に対してサーボモータ4つを追加したら重心が高くなり横方向にふらつくようになりました。安定性を確保するために足裏にラージソールパーツを追加。だいぶん安定するようになりましたが、まだまだ心もとない感じ。より高度な安定を求めるのであれば、ジャイロ回路を追加して転倒方向と逆方向にモータを回転させて復元力を高めることができます。どうしようかな。
KHR-1は静歩行を基本としているのですが、いろいろなセンサを組み合わせることでより安定、高速な歩行ができる拡張性をもっています。自分のアイデア次第で問題を解決しパフォーマンスを高めることができることが、小型ロボットの魅力だと思います。
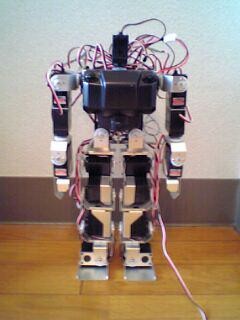
サーボモータ追加により上肢がでかくなりました。
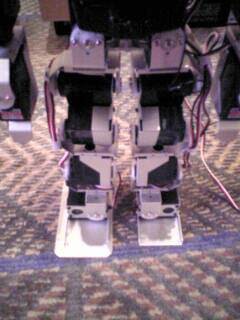
右足にラージソールを追加。

片足立ちもOK。より安定にするためには?