腕の自由度をふやす
KHR-1のハードウェア・ソフトウェアの開発環境構築はもうすぐ終わりそうです。
えーと、昨日「旋回軸」オプションにより股関節に自由度を追加することで足全体の内旋/外旋を実現できるようになりました。この「旋回軸」オプションには、腕の自由度を追加するためのブラケットが同梱されていました。つまり、サーボモータを購入すれば、腕の自由度を増やすことができます。ということでチャレンジです。

これが標準の腕3自由度です。肘を折ると胴体の前に手が持っていかれます。
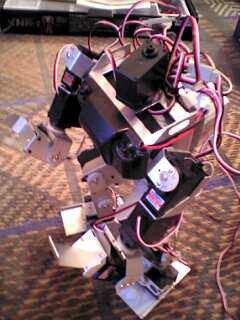
腕4自由度にすると、肘を折った時に「小さく前にならえ」ができます。
サーボモータを追加した分、標準品よりもリーチが伸びます。
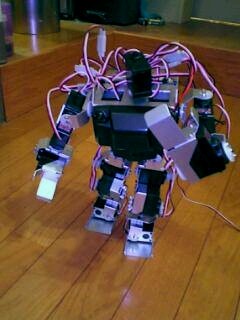
ただし、標準品とは大分重心バランスが変わってくるので、標準品で作成したモーションを使うにはバランス調整が必要になるでしょう。足裏を広くするブラケットを追加して安定性を増す、という方法もあるでしょう。